Shedding light on loadings uncertainties
To improve safety, Seaspan and DNV GL joined forces to develop a laser measurement system as a practical means to verify loading computer data. The system, which was tested successfully on board a 10,000 TEU container ship, confirmed that the loading computer may occasionally be inaccurate.
Several moments can act on a vessel: still water bending, wave bending and whipping moments. In response to container ship accidents where the hull damage occurred in bad weather conditions, both IACS and IMO issued documents to improve design and operational safety: IACS’s unified requirements for the longitudinal strength of container ships (UR S11A) focus on wave bending, the cross-sectional collapse check, and functional requirements for whipping of container ships with a beam larger than 32 metres; and IMO’s update of SOLAS VI/2 addresses verification of container weights. Both documents came into force in July 2016.
UR S11A addresses the design-related wave bending and whipping behaviour, while SOLAS VI/2 pertains to the uncertainty of the still water bending moment in operation. While these requirements are necessary, they do not define detailed procedural steps. The specifics regarding whipping calculation which are missing from UR S11A are covered by DNV GL rules for container ships and class notation WIV. IMO and IACS do not specify requirements for wave bending and whipping in operation; this can be handled by hull monitoring associated with the DNV GL class notation HMON.
Uncertainty lessons learned
The design specifications for a ship define a maximum permissible still water bending moment and class societies verify a permissible still water bending moment curve. During ship operation a loading computer is required to ensure that still water bending remains within defined limits. According to UR S11A there is no design-related uncertainty to still water bending. An accident investigation report on a cracked container vessel stated that there was a ten per cent uncertainty to the still water bending moment. If the latter was equal to the permissible maximum value, the actual hogging moment could therefore be at 110 per cent, meaning the ship was ten per cent overloaded. Seaspan and DNV GL wanted to find a solution to better handle this uncertainty.
A simple but effective tool
The still water bending moment is affected by several key uncertainties: Those related to container weight, which the updated SOLAS VI/2 tries to eliminate; ballast water and fuel-related uncertainties can result from manual or automatic input into the loading computer; and a third uncertainty comes into play when the loading computer calculates the balance between buoyancy distribution and mass distribution assuming a rigid hull although the hull is actually flexible. When the hull bends, the buoyancy distribution and therefore the still water bending moment change. Sea pressure acting at the ship ends also bends the ship. These two effects can be in the range of several per cent, depending on draught and ship length.
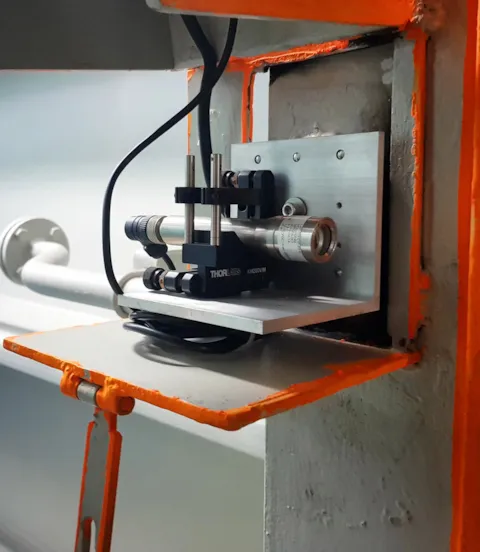
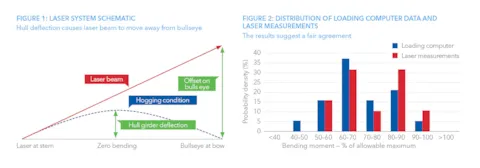
To study the deflection of the hull of a 10,000 TEU container vessel in still water conditions, Seaspan and DNV GL installed a laser gun in the stern area of the longitudinal passageway running along the top edge of the hull, and a target screen near the bow. When the hull deflects, the laser beam moves away from the bullseye on the target screen. The best-suited positions for the aser gun and target as well as the conversion factor between the laser beam offset and the corresponding deflection of the hull girder were determined using finite element structural analysis. A second conversion factor was derived to estimate the still water bending moment. Calibration analysis is also essential based on the actual loading condition, preferably with the ship empty.
First alert system for overloading condition
Nineteen different loading conditions were assessed. For each loading condition, the loading computer data was read and a draft survey was performed. Figure 2 compares the still water bending moment distribution from the laser system with the data from the loading computer, which showed an average of 73.8 per cent of the maximum permissible bending moment, 2.5 per cent more than the loading computer, suggesting fair agreement. However, the individual differences (95 per cent confidence interval) suggest that the real hogging moment is from 15.8 per cent below to 20.8 per cent above the loading computer values, a significant residual uncertainty, while no overloading was confirmed. A significant part of this deviation is assumed to be caused by uncertainties to tankage (exact filling level and gravity).
It was further shown that using draft surveys to estimate hull bending is much less reliable than using the laser system. It is only useful for mis-declared weights, which were in the range from –1.3 to 2.9 per cent (95 per cent confidence interval) of the total declared weights. The laser system can be a good first-alert tool for potential overload situations since measurements can be taken quickly and easily in the short time between the end of cargo operations and departure. Based on the results the crew can then perform a careful check of loading computer and draught survey data. The system is being used successfully on board the vessel but for retrofits a good calibration procedure for a non-empty ship is necessary.
